

Editors note: This news post has been modified from it’s source material on our forums, and the photos were converted from .png to .jpg for compatability with our servers, you can see the source presentation and photos here.
The joints are, I admit, very gappy. In order to allow the limbs to move with a near-natural range of positions, I think it’s neccessary. I replaced as many of the ball-jointed sections as I could with hinge arrays – the neck, fingers and wrists are the only joints that use the ball bearing method, which suffer heavily from lag when they’re posed.
The picture’s not all that clear at this distance, so here’s a range of pictures that cover pretty much all the surfaces in recognisable detail:
Feet and shins


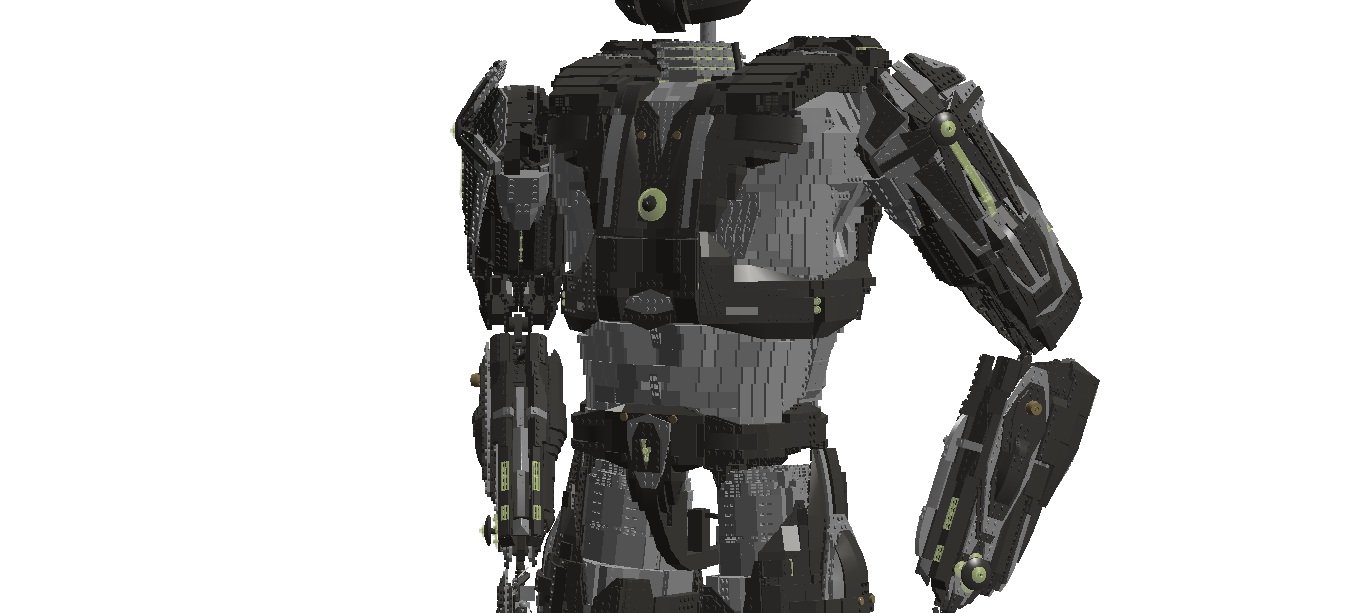
Thighs, pelvis, and lower arms


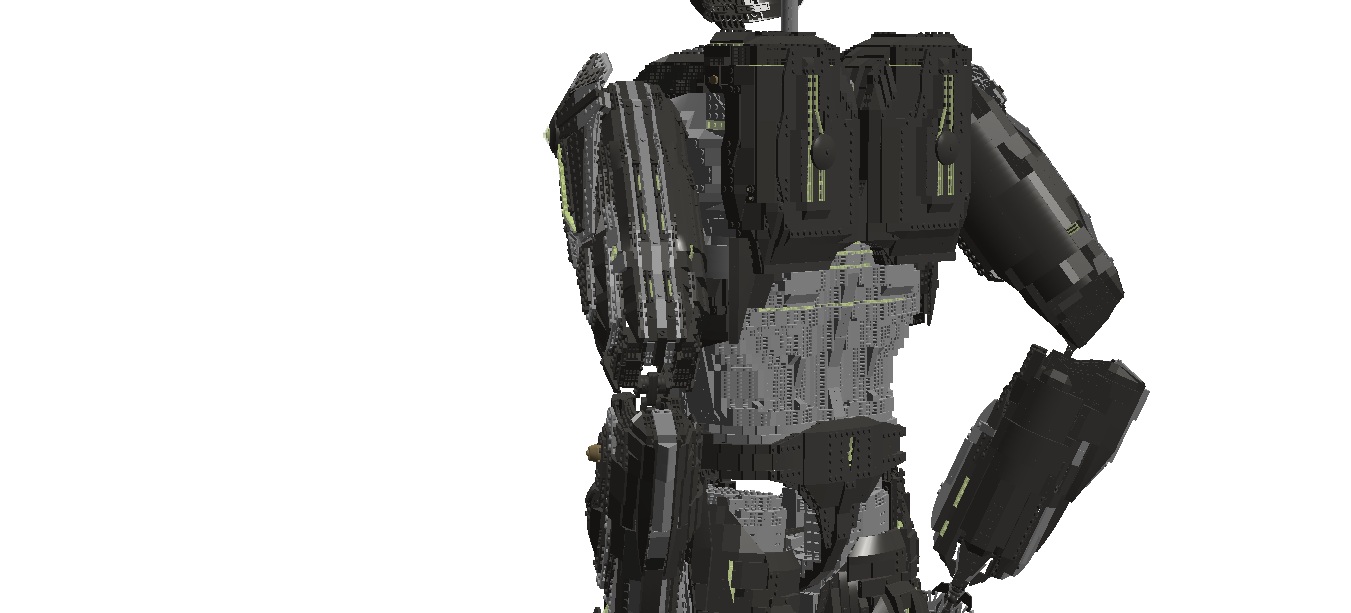
Torso
Kanohi Ruru
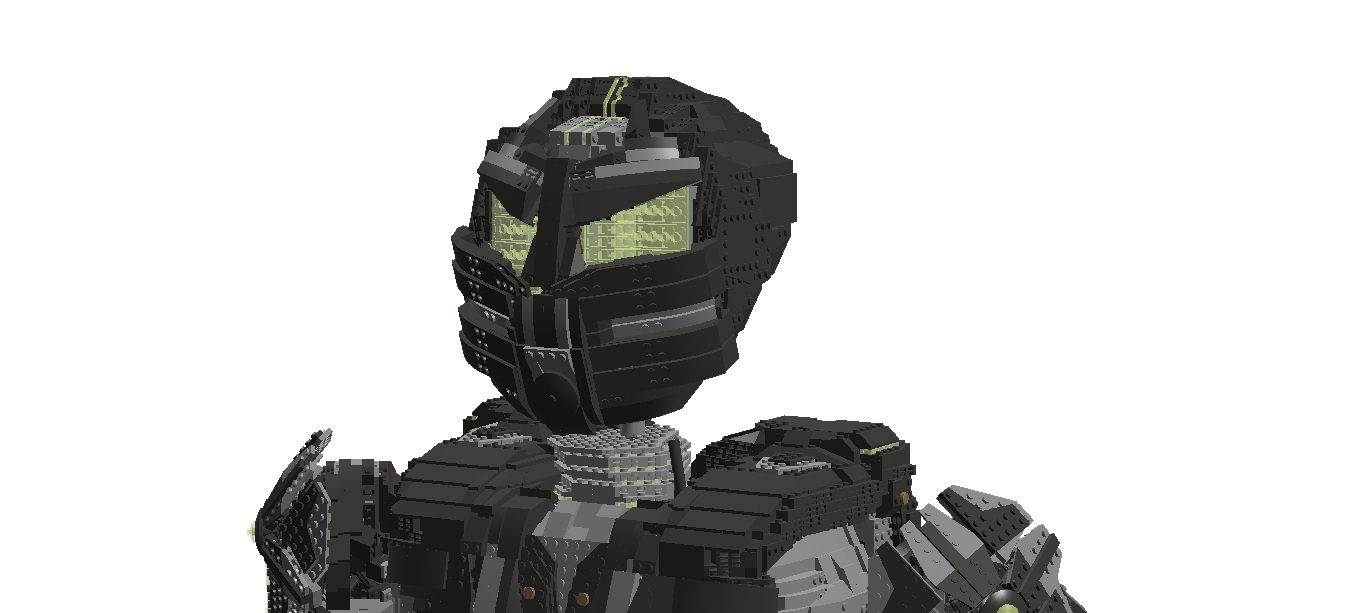
(It’s not actually supposed to be a Ruru, but that’s not the topic, here)
And yeah… Full body Articulation.


Counting the three-hinge arrays replacing the ball joints as one joint, he has 43 points of articulation, while in practice it’s 55.
If you want the file to play around with, it’s here. Bear in mind it’s a huge, laggy model. It might not be supportable on some computers, and it’ll appear to freeze whenever you edit an angle, change the group of bricks you’re changing the angles around, switch the angle tool (after it’s been used) for any other tool, when you load it or when you save it. These are all temporary effects, though. In the most severe cases (on this computer), they’ll last three minutes at most (doing things like rotating the whole body around an extremity like a foot or a knuckle).
So, comments? If you have any ideas, I’d really appreciate feedback on ideas to make the others less gappy, while still mobile. I don’t think I’ll be editing this one, though.
.
0 Comments